车机技术之360°全景影像(环视)系统
概述
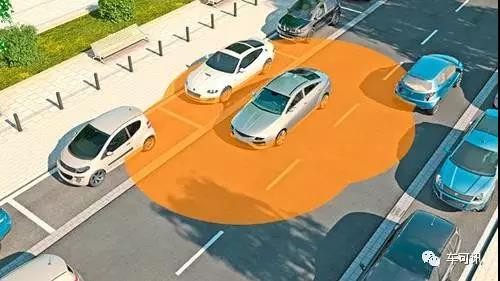
360度全景系统提供给驾驶员一个新的、以前无法获得的车辆视角,通常是使用4个摄像头和一个ECU,在一些复杂情况下,这些视角对驾驶员非常有用,例如高速公路上变道时的盲点探测,从平行的停车位中把车辆安全的移出。 360度全景系统依靠4枚大于180°水平视野的鱼眼摄像头来探测车辆周围的情况,综合利用这4个摄像头能够建立起车辆周围任何视角的影像。
360环视系统,系统同时采集车辆四周的影像,经过图像处理单元一系列的智能算法处理,最终形成一幅车辆四周的全景俯视图显示在屏幕上,直观地呈现出车辆所处的位置和周边情况。
全景系统最终可实现智能、主动全景系统,它包含四个摄像头–车头,车尾,车外后视镜–它不仅能够监控车辆周围的情况,也能识别行人,警告驾驶员,甚至在危急情况下刹停车辆,所以特别适合城市驾驶,可以尽早的识别附近的行人。还可以探测穿过本车行驶轨迹的其他车辆,实现车道保持,甚至识别路沿石。
系统构成
系统构成图如下图所示,简化的有用2个摄像头的(一般效果不好),复杂可有用6个甚至8个摄像头的。

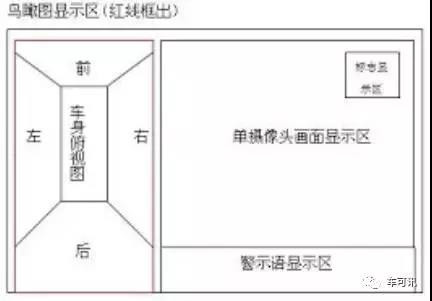
显示原理示意图:
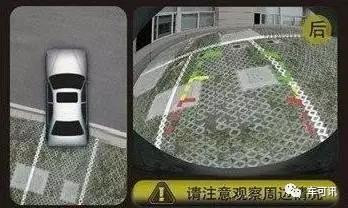
实际效果
早期的有缝拼接效果
四个摄像头的广角在150度到180度之间,对拍摄的图像进行处理和显示,不是像分频显示那样简单地将图像叠加起来,而是将图像处理后,中间是车子,将图像放在周边,很直观。但是有一个缺点,由于技术的问题,四个图像拼接的地方,就是四个对角线上,无法进行全面平滑的处理,因此在四个图像的拼接处有明显的四条线。

当前的无缝拼接效果
在其基础上进行优化,利用的也是四个广角摄像头,广角在170度到180度之间,对采集的图象进行畸变还原和完美无缝拼接,也就是说没有了拼接线,就象卫星的航拍图一样,高空俯视下来,车的周围真正没有盲区,连车在里面,展示一个完美的整体景象。
将来的3D全景效果
相较上面2D的产品形态,这种3D全景倒车系统从VR的发展上得到了灵感,不仅带来新的视角体验,更重要的是提升了安全性。在视距上,也从传统的3m扩大至无穷远,能更好地确保车主泊车和在复杂路况下行驶安全。

环视系统发展趋势
(一)、扩展功能的发展前景
1、行车记录(本机存储)
2、实时监控和网络传输并存储
3、触发报警和移动监控
4、远程遥控监视
(二)、应用延伸功能的发展前景(智能化应用)
1、障碍物识别
2、障碍物测距
3、行驶报警
4、主动规避
5、智能驾驶
6、无人驾驶