车机技术之ADAS(先进驾驶辅助系统)
在介绍ADAS之前,我们先来看看自动驾驶的级别,如下图所示:
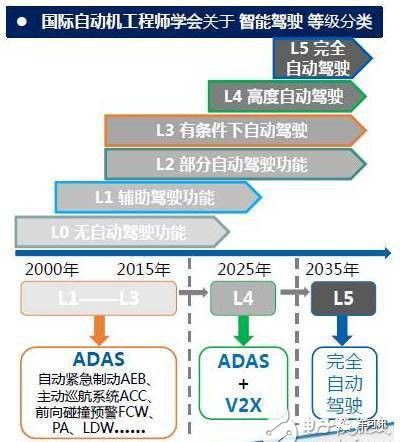
当前一般说的ADAS就是指的L1,有些车上也实现L2(比如沃尔沃的自动制动),更高级别的一般直接归到自动驾驶技术类,不直接叫ADAS了。
完整的ADAS可以包括导航与实时交通系统TMC,电子警察系统ISA、车联网、自适应巡航ACC、车道偏移报警系统LDWS、车道保持系统、碰撞避免或预碰撞系统、夜视系统、自适应灯光控制、行人保护系统、自动泊车系统、交通标志识别、盲点探测、驾驶员疲劳探测、下坡控制系统和电动汽车报警系统。
所以所谓的ADAS定义,是利用安装于车上的各式各样的传感器, 在第一时间收集车内外的环境数据, 进行静、动态物体的辨识、侦测与追踪等技术上的处理, 从而能够让驾驶者在最快的时间察觉可能发生的危险, 以引起注意和提高安全性的主动安全技术。
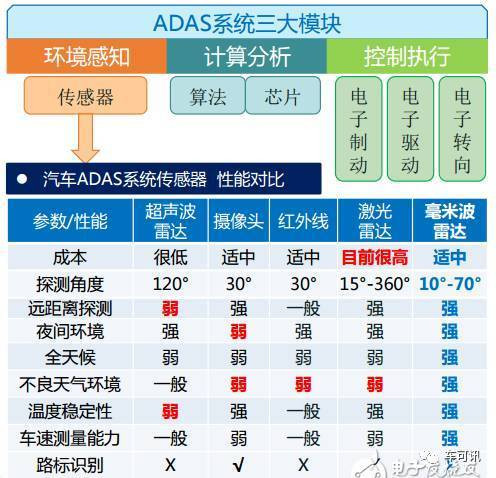
ADAS系统分为环境感知、计算分析、控制执行三大模块,如下图所示,环境感知主要的雷达、摄像头、红外线这几种,按照现在的优缺点和技术成熟度,这里主要关注摄像头方式和毫米波雷达方式:
基于毫米波雷达的ADAS
通常将波长为1~10毫米的电磁波称毫米波(millimeter wave),它位于微波与远红外波相交叠的波长范围,车载毫米波雷达工作的频段为24GHz和77GHz,少数国家(如日本)采用60GHz频段,现在77GHz占主流。根据辐射电磁波方式不同,毫米波雷达主要有脉冲体制以及连续波体制两种工作体制。
下图为其工作原理图:
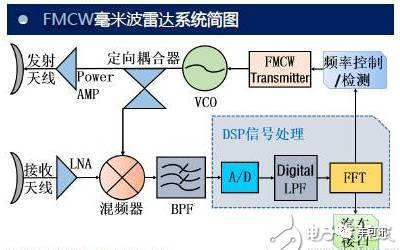
车载毫米波雷达通过天线向外发射毫米波,接收目标反射信号,经后方处理后快速准确地获取汽车车身周围的物理环境信息(如汽车与其他物体之间的相对距离、相对速度、角度、运动方向等),然后根据所探知的物体信息进行目标追踪和识别分类,进而结合车身动态信息进行数据融合,最终通过中央处理单元(ECU)进行智能处理。经合理决策后,以声、光及触觉等多种方式告知或警告驾驶员,或及时对汽车做出主动干预,从而保证驾驶过程的安全性和舒适性,减少事故发生几率。
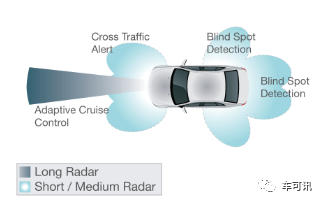
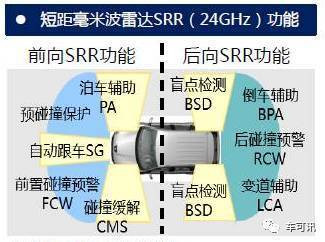
根据毫米波雷达的有效范围,可以将车载毫米波雷达分为长距离雷达(LRR)和中距离雷达(MRR)以及短距离雷达(SRR),如下图所示:

下图为博世的LRR毫米波雷达组成:

基于摄像头视觉的ADAS
视觉ADAS一般的功能有车辆识别及跟踪、车道线识别、交通标志识别、行人识别等等,它可以分为单目(单摄像头)视觉ADAS和双目(双摄像头)视觉ADAS以及最近讨论的多目(多摄像头)视觉ADAS。
视觉ADAS的基本原理如下图:
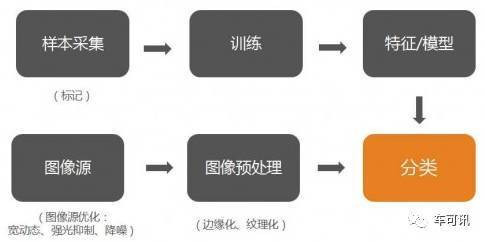
整个流程包括样本的采集及标记,同时对标记的样本进行大范围训练(可采用神经网络深度学习来实现)来提取特征和模型,将模型作为实际图像数据进行分类识别。另外一个维度,我们需要保证图像源的质量,通过宽动态、强光抑制、降噪等技术来保证输入数据源的干净,将真实环境清晰的数据进行边缘化和纹理化送入分类器进行识别。同时,在这个环节我们要非常注重模型数据和图像源数据的一致性,即样本标记的数据和实际图像源要来自相同的镜头、图像Sensor和相同的ISP技术,来保证训练和实际的高匹配,具体的训练算法目前采用深度学习的方法为主。
单目摄像头和双目摄像头的最大不同体现在其测距原理,单目的测距原理是先识别、后估算距离:这是因为单目采用的是图像匹配,即将所需要识别的车辆照片(一般是轿车尾部照片)录入数据库,数据库需要不断更新及维护,单目ADAS在工作时,会将摄像头看到的影像和数据的图像进行对比识别,识别后再估算相应的距离,如果数据库没有相关图片则不能识别。双目摄像头采用的测距原理是先测距,后识别对象:其测距原理采用的是三角测距法,通过视差计算算出车辆与前方物体的距离,也因此,其数据库无需维护就可以达到较高的识别精度,但反过来双目ADAS对计算资源的要求则比较高。
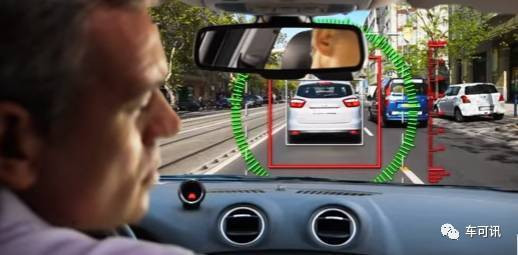
下图是成熟的单目视觉ADAS的Mobileye:

其效果如下图,该司机侧头看东西,导致离前车太近,空调口左上的红色显示告警灯亮了,告警声音也有(图上看不出来),前方的绿色大圈和前方白色小车的红框实际上是看不到的(只是为了演示其算法,现在有些实现在中控显示屏上的ADAS能够显示这些内容):
总结
ADAS在实现全自动驾驶之前的漫长过渡阶段是越来越重要,好多车上已经是标配,随着技术发展和成熟,过几年不成程度的ADAS将出现在各类车上。